
Импортозамещение в деле: учёные РФ подготовили аппарат для глубоководных исследований
В послевоенные годы в практику морских геологических работ начали внедрять геофизические методы исследований. Глубину и рельеф дна стали изучать с помощью эхолотов, гидролокаторов и акустических профилографов, работающих по принципу измерения времени, затраченного на прохождение звукового сигнала с корабля до дна и обратно. Этот же принцип, но с применением особо мощных сигналов, позволил изучать внутреннее строение толщи рыхлых осадков, покрывающих дно.
В настоящее время для геологических исследований морских глубин применяются различные автоматические приборы. Так, микрорельеф дна, осадки и выходы коренных пород, флору и фауну успешно изучают с помощью подводных фотокамер. На сегодняшний день на рынке не существует модульного аппарата, который можно было бы оснастить необходимыми для конкретного исследования приборами, позволяющими получать общую картину для больших площадей морского дна.
У Кусто были подводные фотосани
Весной 2017 года команда Центра морских исследований МГУ им. М.В.Ломоносова, в состав которой входили геологи, экологи, инженеры, программисты и другие специалисты, в рамках дорожной карты «Маринет» НТИ по заказу Фонда содействия инновациям начала работу над программно-аппаратным комплексом, предназначенным для картографирования морского дна на различных глубинах, а также дешифрирования и визуального заверения обнаруженных объектов.
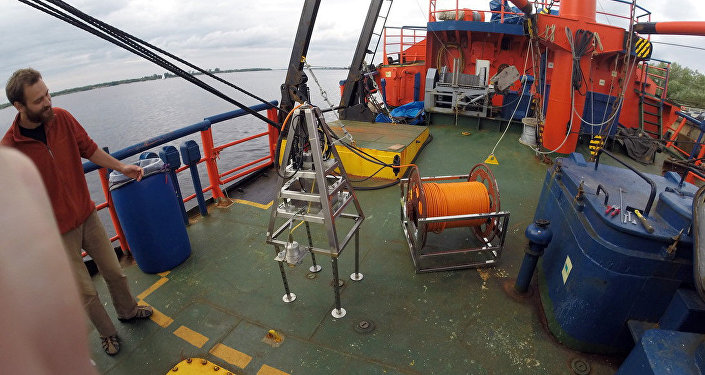
©Пресс-служба Научного парка МГУ. Испытания комплекса для глубоководных исследований
«Задача площадного картирования донных ландшафтов была поставлена перед командой центра еще в 2014 году. Опытно-конструкторский отдел центра должен был решить, как за короткий период собрать максимально большой объём данных, которым впоследствии смогли бы воспользоваться специалисты различных направлений и в первую очередь, конечно, геологи и биологи, — рассказывает Владимир Чава, заместитель руководителя управления проектно-изыскательских работ Центра морских исследований МГУ им. М.В.Ломоносова, стоявший у истоков проекта. — Мысль о создании подобного комплекса возникла у меня после знакомства с книгой «Живое море» Жака Ива Кусто. В ней всемирно известный исследователь морских глубин описал, как он вместе со своими сподвижниками создал буксируемые подводные фотосани. В течение последующих десятилетий в подобного рода разработках участвовали учёные из разных стран, аппараты создавали в Германии, Норвегии, Соединённых Штатах Америки. В России же такие системы активно не развивали, применялись они только отдельными научными организациями, а коммерчески доступного аппарата на данный момент так и не было создано».
Владимир Чава объясняет, что на базе Беломорской биологической станции МГУ имени Н.А.Перцова специалисты объединили классические методы пробоотбора со съёмкой гидролокатором бокового обзора, которую необходимо заверять подводной фото- и видеосъёмкой, в том числе на глубинах, где невозможно проводить водолазные работы. Обычно в таких случаях используют телеуправляемые необитаемые подводные аппараты (ТНПА). Они отлично справляются с решением данной задачи, если необходима точечная съёмка, когда в результате получается не некий протяжённый видеоряд, а съёмка в окрестностях одной точки. А для получения видеоряда, например, на протяжении трёх километров приходилось многократно переставлять судно, опускать и поднимать аппарат, что достаточно дорого и сложно. Это и стало причиной создания более универсальной установки.
В первоначальном варианте разработанный специалистами центра прототип программно-аппаратного комплекса имел форму пирамиды и был оснащён камерой широкого разрешения, альтиметром, имел четыре светодиодных светильника и целеуказатели, предназначенные для последующей обработки данных, в частности для определения расстояния между объектами и их размеров. На данном этапе разработки появилась возможность испытать корпус и понять, правильны ли отдельные конструктивные решения и надёжны ли системы.
От пирамиды к параллелепипеду
Испытания проводились на базе Беломорской биологической станции МГУ имени Н.А.Перцова летом 2017 года. Было решено добавить к комплексу гидролокатор бокового обзора, необходимый для поиска объектов на больших площадях, из-за чего комплекс принял форму параллелепипеда. К тому же прямоугольное строение позволило стабильно буксировать аппарат на специальном тросе. Но на этом усовершенствование комплекса не закончилось. Появилась дополнительная цифровая камера высокого разрешения, а уже существующую заменили на более чувствительный аналог. Это позволило получать данные как с гидролокатора бокового обзора, так и с двух камер, каждая из которых предназначена для решения локальных задач. Первая камера располагается перпендикулярно поверхности, вторая имеет механизм вращения, позволяющий получить телеметрию в соответствии с особенностями технического задания. Была также улучшена система освещения. Изменения коснулись и электронно-интерфейсной части подводного комплекса.

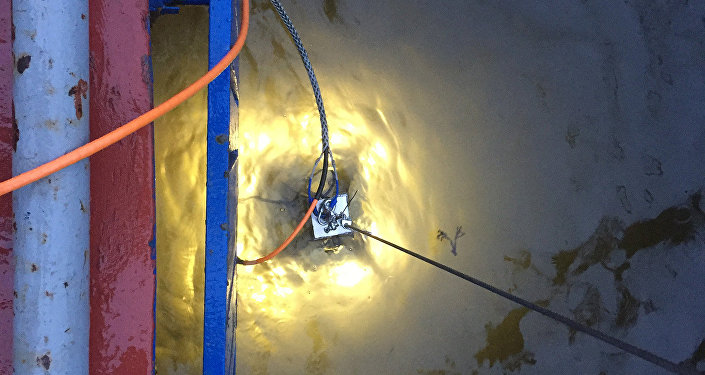
©Пресс-служба Научного парка МГУ. Испытания комплекса для глубоководных исследований
Разработчики подчёркивают, что вся электроники рассчитана на работу в экстремальных условиях холодных арктических морей. Комплекс выполнен из нержавеющего материала и опускается в толщу воды при помощи лебёдки. Существенным достоинством установки является её компактность: в различных комбинациях она может быть использована при работе с малых судов или даже катеров при участии всего лишь двух человек. Фото-, видео- и прочая информация сохраняется на флеш-карту, расположенную на борту подводного автономного комплекса, а также передаётся в режиме реального времени на пульт управления и контроля на борту корабля. Аппарат не требует подзарядки, питание подаётся от дизельного генератора. Тем не менее сохранена возможность использования аккумуляторных блоков для обеспечения работы аппарата без внешнего питания в автономном режиме.
«В ходе экологических изысканий на больших глубинах, например в Карском море, мы периодически сталкивались с проблемой телеметрии. Теперь же мы можем получать сигнал с камеры в режиме онлайн. В отличие от привычных ТНПА, новая разработка менее зависима от погодных условий, а волны в северных морях, как известно, явление нередкое. Во время испытаний аппарат с большой точностью зафиксировал как представителей морской фауны, таких как крабы-стригуны и морские звёзды, так и цвет грунта и его рельеф», — рассказывает Владислав Козловский, начальник отдела экологии управления проектно-изыскательских работ Центра морских исследований МГУ им. М.В.Ломоносова.
Испытания в Арктике пройдут уже в этом году
В настоящее время аппарат рассчитан на работу на глубине до 350 м с гидролокатором и 300 м — без него.
©Пресс-служба Научного парка МГУ. Испытания комплекса для глубоководных исследований
Таким образом, разработка центра позволяет одновременно проводить комплекс различных исследований всего лишь за один проход судна, что существенно снижает затраты на проведение морских изысканий, в частности, за счёт сокращения количества специалистов на борту судна (гидрографа, осуществляющего промеры, геофизика для работы с гидролокатором, специалиста по фото- и видеосъёмке) и уменьшения числа остановок на станциях. Разработанный в Центре морских исследований МГУ им. М.В.Ломоносова комплекс также позволяет проводить съёмку при буксировке.
Разработчики заявляют, что этот универсальный прибор будет очень полезен многим специалистам, облегчит им процесс исследований. Аппарат предназначен как для нужд биологов, например при анализе состава донной флоры и фауны, так и для геологических и экологических исследований при нахождении заброшенных нефтяных скважин, определении местоположения техногенных объектов, осуществлении поисково-спасательной деятельности.
Конструкция аппарата постоянно совершенствуется, и в настоящий момент в опытно-конструкторском отделе центра производится сборка новой версии прототипа автономного подводного комплекса, которая пройдёт испытания в реальных суровых полевых условиях Русской Арктики ближайшей весной, как только откроется полевой сезон.